Rezultate
Proiectul HBES TE 114/2020 a vizat proiectarea, realizarea și testarea clinică a unu sistem hibrid exoschelet-FES controlat printr-o interfață creier-calculator (ICC), util în recuperarea membrelor superioare la persoanele cu deficit neuromotor datorat unor leziuni la nivelul sistemului nervos central (de exemplu, datorat unui accident vascular cerebral). Planificarea cercetării întreprinse a inclus modelarea matematică a structurii mecanice, a sistemului FES (stimulare electrică funcţională), realizarea de prototipuri, dezvoltarea platformei software pentru ICC, testarea în laborator şi apoi în limitată în mediu clinic şi, desigur, diseminarea rezultatelor.
Configurarea sistemului HBES
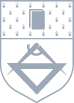
Etapa inițială a proiectului a vizat configurarea sistemului HBES la nivel de schițe dezvoltate pe baza unui studiu bibliografic realizat de membrii echipei de implementare a proiectului. Astfel, a fost investigată biomecanica membrului superior pentru a se modela cinematica biomecanismului membrului superior.
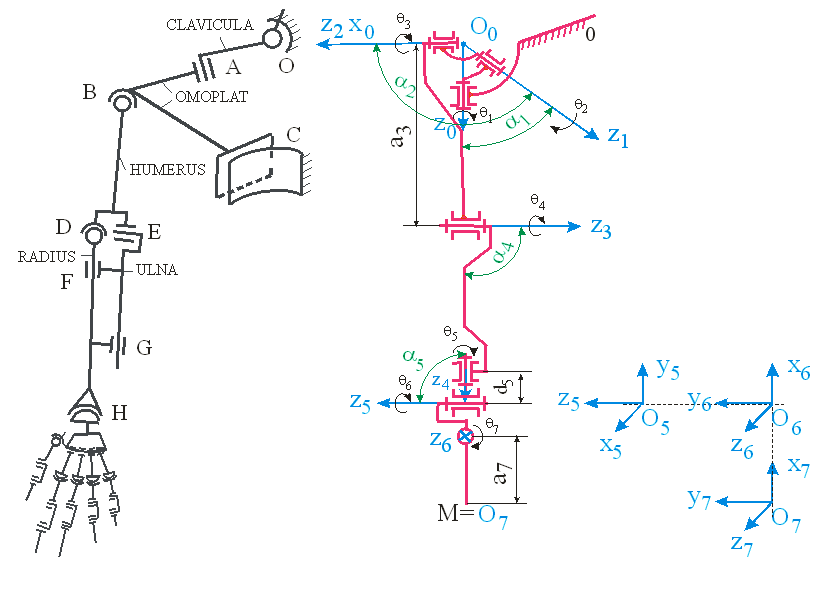
Cercetările au vizat, de asemenea, identificarea soluțiilor tehnice de realizare a sistemului de recuperare destinat membrului superior uman. În paralel s-a realizat și modelarea, analiza și sinteza sistemului de stimulare electrică funcțională, identificându-se pozițiile în care se pot plasa electrozii astfel încât să se realizeze mișcările necesare procesului de reabilitare a brațului așa cum au fost precizate de către personalul medical cu care am colaborat.
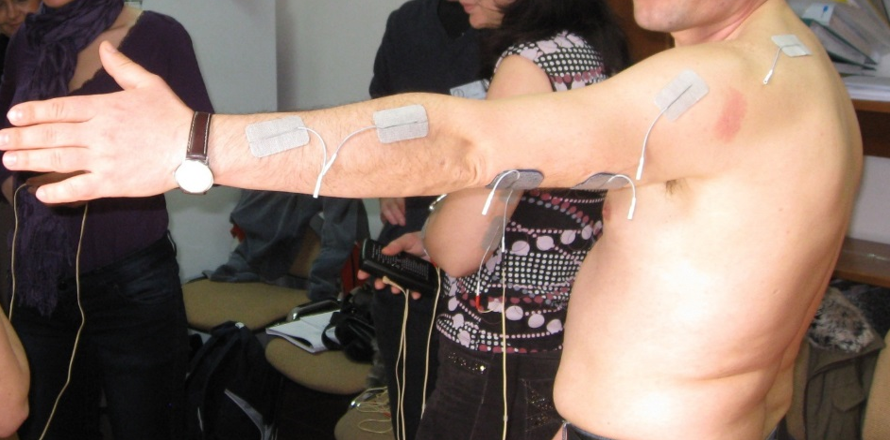
Schema bloc de control a prototipului HBES este prezentata în figura urmatoare. Interfata ICC inregistrează semnalele EEG si le transmite calculatorului coordonator al ICC. Acesta va realizează procesarea, extragerea caracteristicilor și clasificarea semnalelor, si transmite rezultatele către calculatorul coordonator al exoscheletului si a unității FES. Pe baza rezultatelor primite, acesta coordonează atât parametrii de stimulare ai unității FES, cât și mișcările articulațiilor exoscheletului. Aceste mișcări sunt transmise către microcontroller-ul server (Server MCU), care dă semnalele de referință către regulatoarele motoarelor (PID MCU & controller), si transmite înapoi către calculatorul coordonator pozițiile, vitezele unghiulare, etc. ale fiecărei articulații.

Pentru integrarea componentelor hardware și software au fost folosite două calculatorare, datorită faptului că atât algoritmul de procesare și interpretare a datelor pentru sistemul ICC, cât și aplicațiile pentru controlul exoscheletului și a sistemului FES necesită puteri foarte mari de calcul. Comunicația între subsistemele software de pe cele două calculatoare comunică prin interfața TCP/IP. In figura urmatoare este prezintat schematic principiul de lucru al prototipului HBES.
Sistemul BCI citește senmalele EEG, le preprocesează local, și le trimite calculatorului care conține algoritmul pentru procesare și clasificare a semnalelor BCI. În urma extragerii intenției utilizatorului, aceasta este transmisă via TCP/IP către calculatorul care controlează exoscheletul și neurostimulatorul pentru realizarea controlului balansat între stimularea electrică funcțională și mișcările articulațiilor exoscheletului. Toate aplicațiile au fost dezvoltate în mediul de programare Matlab&Simulink.
Testarea în laborator
Pe durata testelor de laborator au fost proiectate diferite exerciții de proiecție înainte-înapoi a brațului și flexie-extensie a articulației cotului. Pe întreaga durată a exercițiilor motorul M1, care realizează aducția/abducția umărului a fost programat să mențină unghiul de 15 grade față de axa verticală, conform figurii urmatoare.
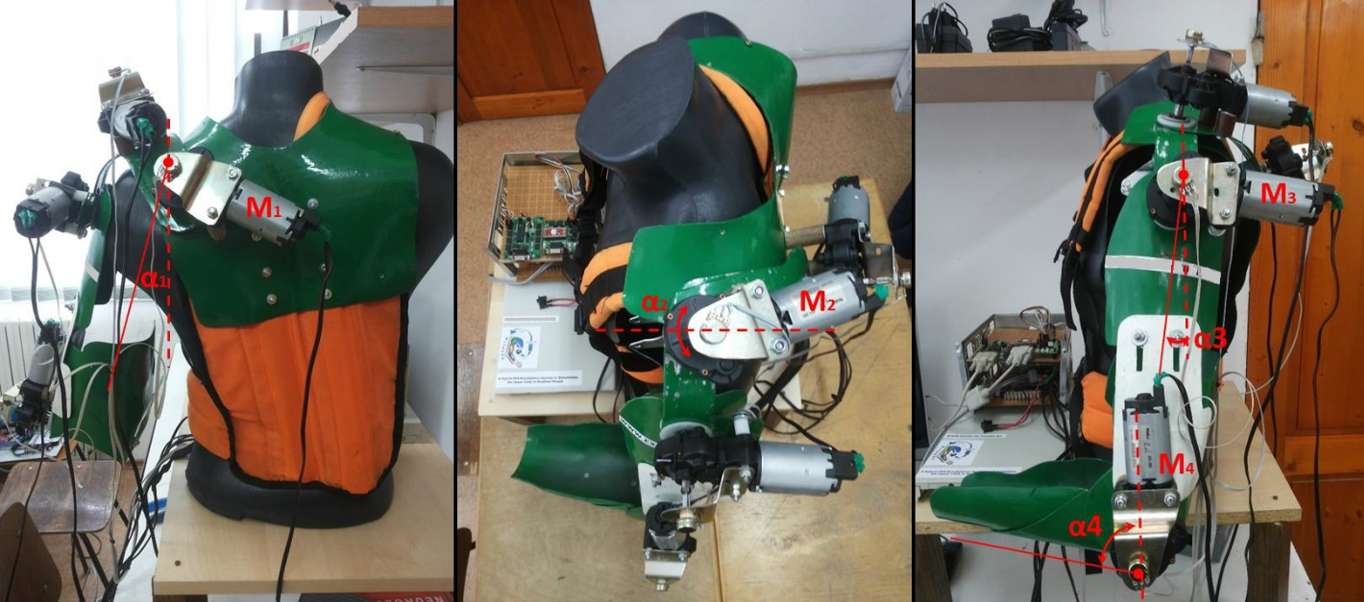
Motorul M2, care realizează mișcarea de rotație internă/externă a umărului a fost programat să mențină unghiul de zero grade. Motorul M3 a realizat proiecția înainte-înapoi a umărului cu unghiul α3 iar motorul M4 a realizat extensia și flexia cotului cu unghiul α4. În timpul testării pe un subiect sănătos, canalul 1 al neurostimulatorului MOTIONSTIM8 a fost asignat motorului M3, electrozii corespunzători acestuia fiind plasați pe mușchiul triceps, pentru a induce mișcarea de extensie a cotului, simultan cu motorul M3. Canalul 2 al neurostimulatorului a fost asignat motorului M4, iar electrozii corespunzători acestuia au fost plasați la nivelul extensorilor mâinii, pentru a induce mișcarea de deschidere a mâinii, în momentul în care articulația cotului a atins unghiul maxim prescris pentru extensie.
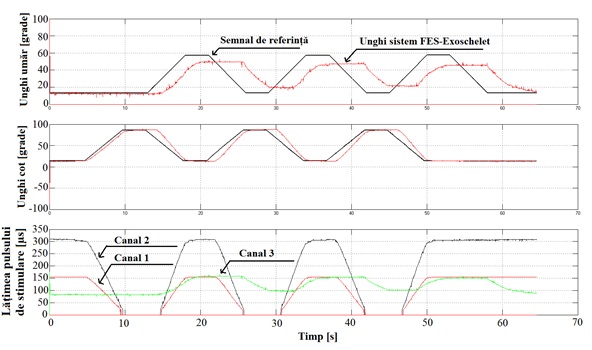
În vederea realizării mișcărilor de flexie și extensie a brațului paretic, stimularea electrică funcțională a fost aplicată pe următoarele grupe musculare: deltoid, triceps și extensorii mâinii. Corespondența canal de stimulare – mușchi stimulat utilizată a fost: canal1 – triceps, canal2 – extensorii mâinii, canal3 – deltoidul median. Frecvența de stimulare utilizată a fost de 50 Hz. Înainte de începerea experimentului au fost testate valorile maxime ale parametrilor semnalului de stimulare pentru fiecare grupa musculară, aceste valori conducând la contracția dorită pentru producerea unei mișcări funcționale. În figura urmatoare sunt prezentate semnalele de referință, poziționarea motoarelor care antrenează articulațiile umărului și a cotului și, de asemenea, variația lățimii pulsurilor semnalelor de stimulare pentru cele trei grupe musculare menționate anterior.
Îmbunătățirea iterativă a sistemului HBES
În urma efectuării unor teste preliminare cu subiecți sănătoși, s-a ajuns la concluzia că este necesară și introducerea celei de-a treia clase de imaginare a mișcării pentru sistemul ICC. În consecință, a fost implementată o extensie a metodei CSP descrisă în Raportul Științific al Etapei II de implementare a proiectului. Astfel, s-a implementat metoda CSP una versus celelalte, iar utilizatorul a trebuit sa își imagineze mișcarea mâinii drepte versus mișcare mâinii stângi sau mișcarea picioarelor, conform indiciului prezentat de paradigma. Acest algoritm a fost testat inițial pe 7 persoane sănătoase. Datele utilizate au fost procesate similar studiului efectuat în etapa precedentă, rezultând o nouă metodă de alegere a parametrilor sistemului BCI bazat pe imaginarea mișcării pe trei clase.
Testele clinice finale ale sistemului HBES
Obiectivul principal al proiectului HBES fost acela al dezvoltării unui sistem hibrid BCI-exoschelet-FES pentru procesul de recuperare al membrelor superioare pentru pacienții care au suferit un accident vascular cerebral. În ultima etapa a proiectului s-a realizat testarea sistemului dezvoltat în etapele anterioare în mediu clinic pe pacienți cu deficit neuromotor cauzat de AVC. Testele clinice limitate au inclus 10 pacienți cu accident vascular cerebral ischemic. Pacienții au fost evaluați folosind componenta pentru braț (părțile I-VI) ale scalei Fugl-Meyer, impresia globală de schimbare a pacientului (PGI-C), impresia globală de schimbare a clinicianului (CGI-C) și scala Brunstromm. Testarea clinică s-a efectuat înainte de începerea programului de recuperare și la sfârșitul acestuia, cu excepția PGI-C si a CGI-C care s-au administrat doar după programul de antrenament. Impactul programului de recuperare a fost favorabil, cu creșterea scorurilor corespunzătoare pe scala Fugl-Meyer. Exista o tendință la o ameliorare mai bună a mișcărilor exersate (subscala V), deși din punct de vedere cantitativ creșterea înregistrată în aceste componente ale scorului nu este suficientă pentru a atinge pragul de semnificație. Creșterea semnificativa a fost generată prin creșteri la nivelul tuturor subscalelor. Poate fi astfel speculat un impact direct asupra mișcărilor exersate, și potențial o ameliorare mai largă prin creșterea tipului mișcărilor incluse în programul de exerciții. Cu certitudine amploarea modificărilor nu este suficientă pentru a putea duce la o trecere de la o treapta la alta pe scala Brunstromm. Această scală cuprinde însă categorii funcționale largi, și nu permite evaluări de finețe asupra unor componente individuale. Rămâne însă de stabilit importanța funcțională a achizițiilor realizate de pacienți in cadrul programului.
Individual, cele mai importante diferențe au fost constatate la pacienții cu afectare "medie" în cadrul lotului (scor intre 20 si 25), și mai puțin la pacienții cu scor inițial 10-15 sau la pacientul cu scor peste 30. Dintre cei 10 subiecți, 4 nu au înregistrat o ameliorare a scorului Fugl-Meyer, câte 2 au înregistrat o creștere de 1 si respectiv 2 puncte, un subiect a înregistrat o creștere de 3 puncte, diferența maximă (de 5 puncte) fiind înregistrată într-un singur caz. Este posibil ca, dat fiind numărul redus de subiecți, creșterea individuală să influențeze semnificativ rezultatele statistice, dar semnificația se păstrează chiar dacă subiectul cu creșterea cea mai mare (de 5 puncte) este exclus (p=0,028).
Publicatii
Diseminarea rezultatelor proiectuluis-a realizat prin:
- Publicarea în reviste/jurnale cu factor de impact:
Hayta, Ünal, Danut Constantin Irimia, Christoph Guger, İbrahim Erkutlu, and İbrahim Halil Güzelbey. 2022. "Optimizing Motor Imagery Parameters for Robotic Arm Control by Brain-Computer Interface" Brain Sciences 12, no. 7: 833. https://doi.org/10.3390/brainsci12070833, Factor de Impact: 3,333.- Publicarea în volume ale conferințelor indexate ISI WOS & BDI:
Mitocaru A., Poboroniuc M.S., Irimia D.C., Baciu A.G., Comparison between two Brain-Computer Interface systems aiming to control a mobile robot, 2021 International Conference on Electromechanical and Energy Systems (SIELMEN), 6-8 Oct. 2021, Iasi, Romania, DOI: 10.1109/SIELMEN53755.2021.9600389, indexed IEEE Xplore.
Marian Poboroniuc, Danuţ Irimia, Radu Ionaşcu, Andrei Iulian Roman, Alexandru Mitocaru, Alina Baciu, Design and Experimental Results of New Devices forUpper Limb Rehabilitation in Stroke, The 9th IEEE International Conference on E-Health and Bioengineering - EHB 2021, Grigore T. Popa University of Medicine and Pharmacy, Web Conference, Romania, November 18-19, 2021, IEEE 978-1-6654-4000-4/21/$31.00, indexed IEEE Xplore.
Ortner R., Dinarès-Ferran J., Irimia DC., Guger C. (2021) Towards Improved Vibro-Tactile P300 BCIs. In: Kurosu M. (eds) Human-Computer Interaction. Interaction Techniques and Novel Applications. HCII 2021. Lecture Notes in Computer Science, vol 12763. Springer, Cham. https://doi.org/10.1007/978-3-030-78465-2_6.
Participarea la Saloane de Inventica:
Participare la Salonul EUROINVENT 2022 cu prototipul HBES, denumirea lucrarii: Brain-Computer Interface to control a humanoid/mechanical robot. Sistemul HBES a fost premiat cu Medalia de Aur.